Model¶
DepthDif uses a conditional pixel-space diffusion model implemented in models/difFF/PixelDiffusion.py.
Model schema:
Core stack:
- Lightning wrapper: PixelDiffusionConditional
- diffusion core: DenoisingDiffusionConditionalProcess
- denoiser backbone: UnetConvNextBlock (ConvNeXt-style U-Net)
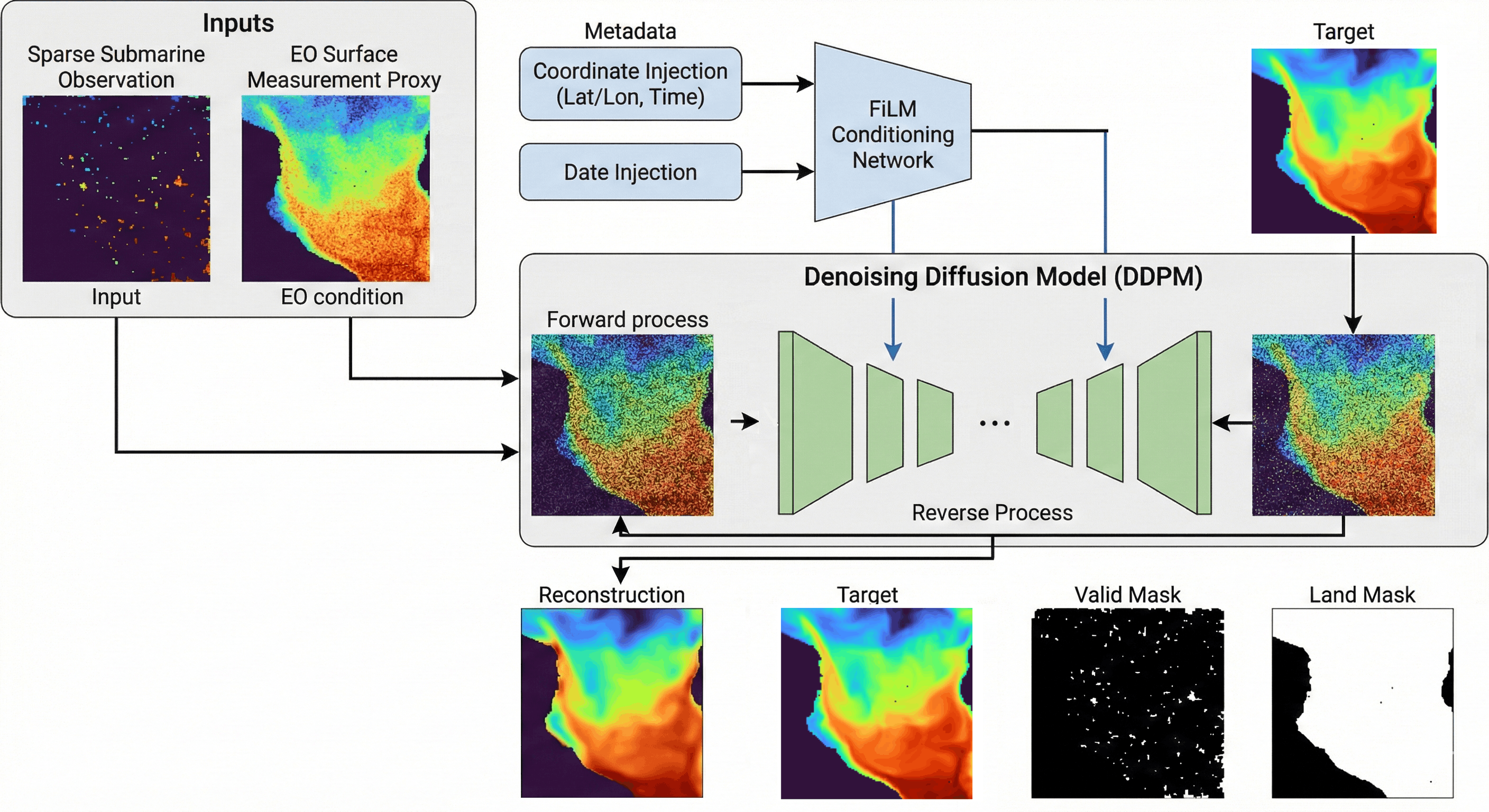
The model learns to generate y while conditioning on observed channels (x, optional eo, optional mask channels).
Conditioning Setup¶
Two conditioning layouts are supported by code/config:
- Single-band task:
x -> y - EO multiband task:
[eo, x, valid_mask] -> y
Condition assembly happens in _prepare_condition_for_model:
- optionally prepend eo (condition_include_eo=true)
- append data channels from x
- optionally append valid-mask channels (condition_use_valid_mask=true)
- enforce channel count equals model.condition_channels
Architecture Summary¶
UnetConvNextBlock follows a U-Net encoder/decoder with ConvNeXt blocks and linear attention.
With default dim_mults=[1,2,4,8]:
- 4 downsampling stages
- bottleneck block with attention
- 3 upsampling stages with skip connections
- final ConvNeXt block + 1x1 output conv to generated_channels
Time conditioning: - sinusoidal timestep embedding -> MLP -> additive bias in ConvNeXt blocks
Coordinate/date conditioning (when enabled): - per-channel FiLM scale/shift in ConvNeXt blocks - details in Date + Coordination Injection
Training Objective¶
Training step (training_step) calls conditional diffusion p_loss on standardized temperature tensors.
Behavior:
- sample random timestep t
- forward diffuse y to noisy target branch
- predict either:
- noise (epsilon parameterization), or
- clean sample (x0 parameterization)
Loss options:
- unmasked MSE (default behavior when masking disabled)
- masked MSE over missing pixels (1 - valid_mask) with optional ocean gating via land_mask
Current EO config (configs/model_config_eo_4band.yaml) uses:
- parameterization: "x0"
- mask_loss_with_valid_pixels: true
Inference Flow¶
Prediction entry point is predict_step.
At inference:
- build condition tensor from batch inputs
- start reverse process from Gaussian latent
- keep condition fixed during reverse sampling
- use configured sampler (ddpm by default, ddim optional)
- optional known-pixel clamping can overwrite known pixels each step
Output dictionary from predict_step:
- y_hat: standardized model output
- y_hat_denorm: denormalized output
- denoise_samples: optional intermediate reverse samples
- x0_denoise_samples: optional per-step x0 predictions
- sampler: sampler object used
Post-Processing in Lightning Inference¶
After denormalization, inference can apply:
- optional Gaussian blur (model.post_process.gaussian_blur.*)
- merge observed pixels from x (where valid_mask=1) with generated pixels (where valid_mask=0)
- zero land pixels using land_mask
This post-processing is centralized in predict_step.
Validation Diagnostics¶
Validation computes two paths:
- per-batch validation loss (validation_step) using the same objective as training
- one full reverse-diffusion reconstruction per epoch from cached first validation batch (on_validation_epoch_end)
When available, full reconstruction logging includes:
- MSE
- PSNR/SSIM (if skimage is installed)
- qualitative reconstruction grid
- denoising-intermediate grid and MAE-vs-step curve (when intermediates enabled)
- plotting applies land_mask for visualization (land set to zero) but does not hide generated regions with valid_mask